Achievement
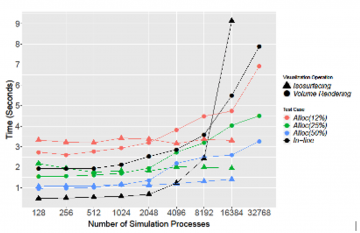
A team of researchers led by Oak Ridge National Laboratory (ORNL) published a study quantifying the time to solution for different in situ visualization paradigms on varying algorithms, scale and sizes. We demonstrated that in-transit techniques are faster than in-line techniques for communication-bound visualization algorithms at large-scale, and that they are also faster for computation-bound algorithms with longer simulation cycle times.
Significance and Impact
It has traditionally been thought that in-transit visualization is more time intensive to use than in-line techniques due to the additional synchronization requited. We show that this is not always the case. In fact, it is possible to have in-transit techniques be than in-line methods at large scale, due to visualization algorithms running more efficiently on smaller allocations than a simulation.
Research Details
- Utilized a proxy application running on Titan using VTK-m for visualization and ADIOS for in-transit data movement
- Showed that in-transit was faster in all cases with communication-bound algorithms
- Showed that in-line was faster in computation-bound cases with fast simulation cycle times, but that int-transit was faster in cases with longer simulation cycle times
Citation and DOI:
J. Kress, M. Larsen, J. Choi, M. Kim, M. Wolf, N. Podhorszki, S. Klasky, H. Childs, D. Pugmire, Comparing Time-to-Solution for In Situ Visualization Paradigms at Scale IEEE Visualization 2020, October 2020
Overview
This study considers time-to-solution for two in situ visualization paradigms: in-line and in-transit. It is a follow-on work to two previously published studies. The first study [1] considered time-to-solution (wall clock time) and total cost (total node seconds incurred) for a single visualization algorithm (isosurfacing). The second study [2] considered only total cost and added a second algorithm (volume rendering). This paper completes the evaluation, considering time-to-solution for both algorithms. In particular, it extends the first study by adding additional insights from including a second algorithm at larger scale and by doing more extended and formal analysis regarding time-to-solution. Further, it complements the second study as the best in situ configuration to choose can vary when considering time-to-solution over cost. It also makes use of the same data corpus used in the second study, although that data corpus has been refactored with time-to-solution in mind. To this end, we present a study comparing time-to-solution for in-line and in-transit in situ visualization, measuring impact on the ability of the simulation to progress quickly. Our contributions from this study inform desirable in situ configurations across a variety of simulation scales for both a computation-bound and communication-bound visualization operation.
Last Updated: January 17, 2021 - 3:30 pm